GaTORS: A Game-Theoretic Tool for Optimal Robot Selection and Design in Surface Coverage Applications
Steven Swanbeck, Daniel Meza, Jared Rosenbaum, David Fridovich-Keil, and Mitch Pryor
About
As the number of commercially-available robots increases, users face the challenge of evaluating many options to identify the optimal system for their needs. This market saturation also compels providers to ensure new systems are competitive with or superior to existing robots to increase economic viability. The need for evaluation extends to multi- robot teams collaborating toward shared objectives, where understanding individual contributions to overall team per- formance is complex but necessary. One specific application domain for robot platform selection in industry is autonomous surface coverage, which includes tasks such as painting, clean- ing, and surveying in industrial facilities. To assist in the design and selection of robotic systems for surface coverage applications, we introduce GaTORS, a novel tool that frames the surface coverage task allocation process as a collaborative general-sum discrete-time game. By parameterizing robots with a set of common constraints, this tool enables performance evaluation of existing and potential future robotic systems. GaTORS is evaluated in a case study of surface coverage for corrosion mitigation in an industrial refinery, with experiments demonstrating its utility in selecting existing robotic platforms best suited to complete the specific coverage task. These experiments also highlight GaTORS’ potential to inform the design of new systems that can efficiently accomplish assigned tasks within practical time and cost constraints. Due to its flexibility, GaTORS can be easily adapted to provide similar insights for other types of robots in different environments and surface coverage applications.
Methods
GaTORS frames the problem of multi-robot task allocation as a collaborative game parameterized by environment and robot-specific constraints. It is designed to be flexible, allowing custom environments and robots to be implemented to provide robot selection and design guidance based on simulation results in specific environments.
As an example, GaTORS is used to inform robot selection and design choices for peroforming surface coverage for repair of corroded material in an industrial refinery. Material to be colored is marked in pink.
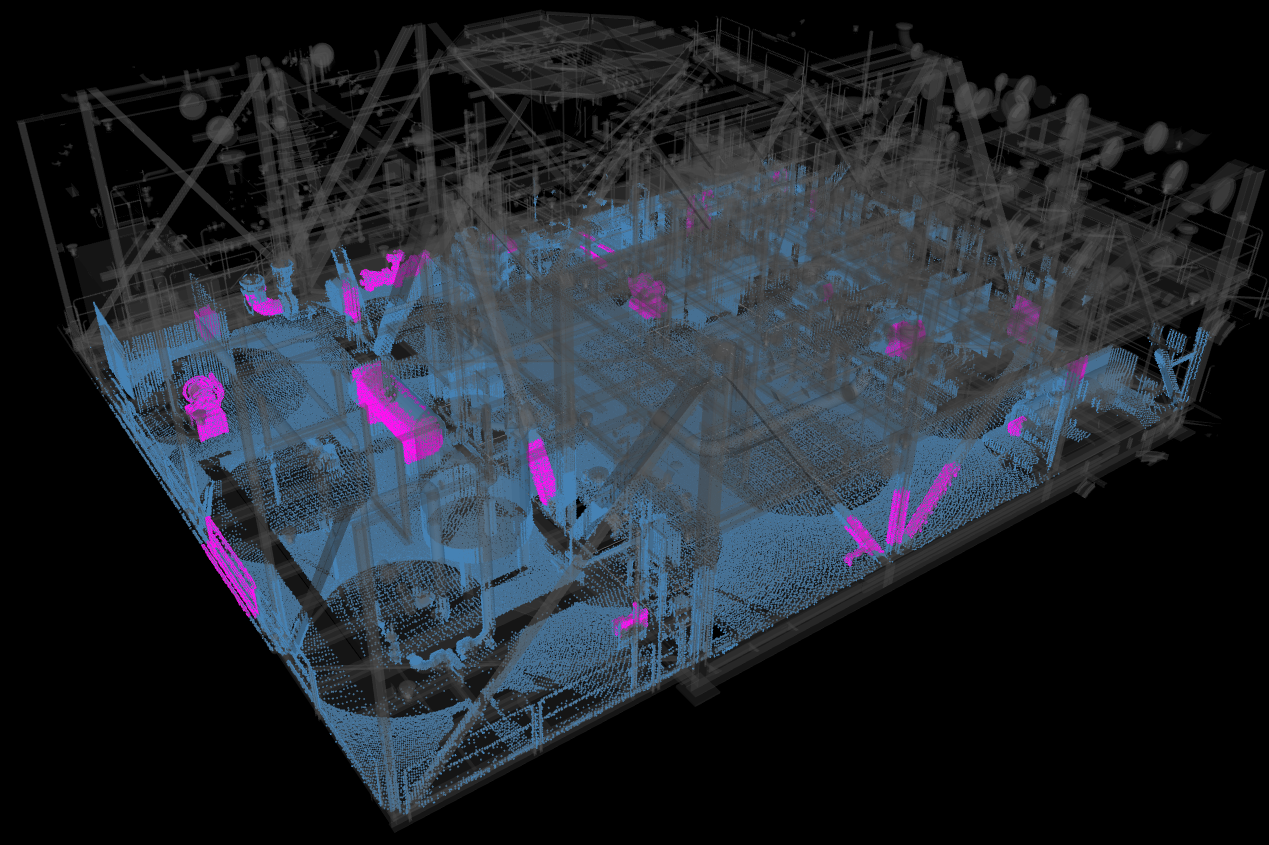
Heterogeneous teams of drone, quadruped, and gantry systems are evaluated for collaboratively completing the repair task.

Based on simulation results, team compositions capable of completing the task under reasonable time and cost considerations are suggested.

Simulation results suggest the drone system is weaker than both the quadruped and gantry systems for this task, so GaTORS is used to perform a parameter sweep over possible drone configurations to set peroformance targtes that would make it competitive.

For details, readers are referred to the paper.